BASIS and
TreeBASIS Feature Descriptor BASIS and
TreeBASIS Feature Descriptor
|
|
|
|
The
BAsis Sparse-coding Inspired Similarity (BASIS)
descriptor uses theory taken from sparse coding
to provide an efficient image feature
description method for frame-to-frame feature
point matching. This descriptor requires
simple mathematical operations, uses
comparatively small memory storage, and can
support color and grayscale feature
description. It is an excellent candidate
for implementation on low-resource systems that
require real-time performance, where complex
mathematical operations are prohibitively
expensive. An improved version of BASIS
descriptor called Tree BAsis Sparse-coding
Inspired Similarity feature descriptor
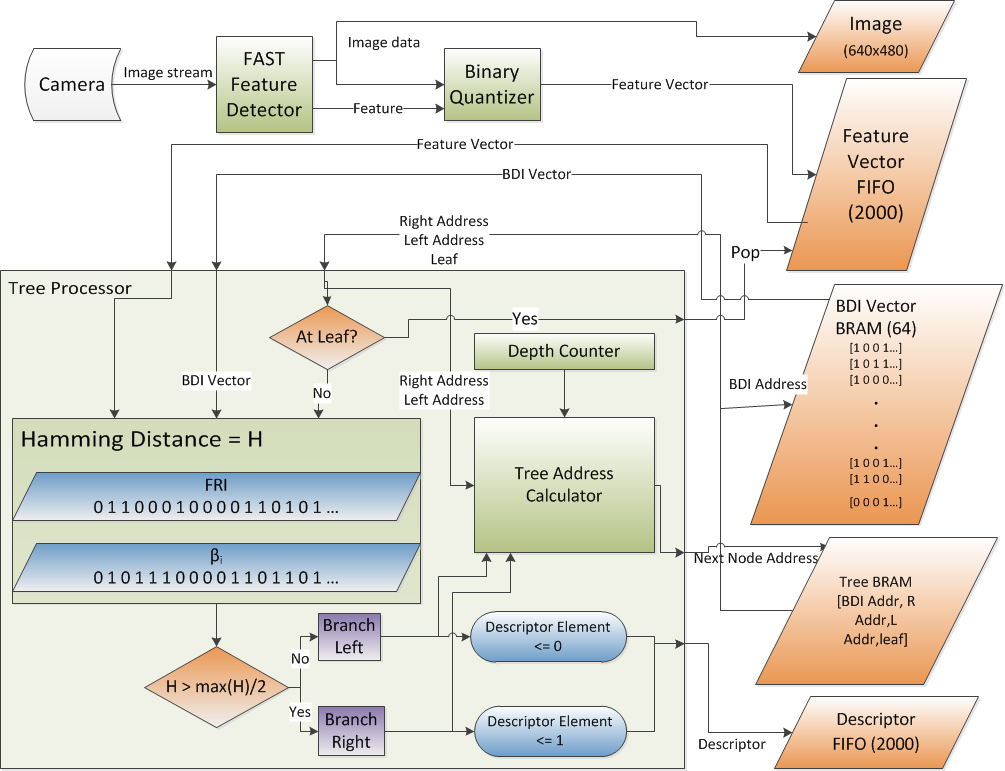
(TreeBASIS) was also developed. TreeBASIS
utilizes a binary vocabulary tree that is
computed off-line using basis dictionary images
(BDIs) derived from sparse coding, and the
resulting tree is stored in memory for on-line
searching. During the on-line algorithm, a small
region around a feature point is passed into the
BASIS tree, where a Hamming distance is computed
between the region and the effectively
descriptive BDI (EDBDI) to determine the branch
taken. The path the FRI takes is saved as the
descriptor, and matching is performed by
following the paths of two features.
Experimental results show that the TreeBASIS
descriptor outperforms SIFT and SURF on
frame-to-frame aerial feature point matching.
|
|
Graduate
Students:
|
Spencer Fowers, Alok Desai
|
Publications:
- S.G. Fowers, ADesai,
D.J. Lee, D. Ventura, and D.K. Wilde, “An
Efficient Tree-Based Feature Descriptor and
Matching Algorithm," AIAA Journal of
Aerospace Information Systems, vol. 11/9, p.
596-606, September 2014.
- S.G. Fowers, D.J. Lee,
D. Ventura, and B.J. Tippetts, “A Novel
Feature Descriptor for Low-Resource Embedded
Vision Sensors for Micro-UAV Applications,"
AIAA Journal of Aerospace Information Systems,
vol. 10/8, p. 385-395, August 2013.
- S.G.
Fowers, K.D. Lillywhite, D.J. Lee, and D.K.
Wilde, “Color DoG: A Three-Channel Color
Feature Detector for Embedded
Systems,” SPIE Electronic Imaging,
Intelligent Robots and Computer Vision XXVII:
Algorithms and Techniques, vol. 7539, 75390X1-9,
San Jose, CA, USA, January 17-21, 2010.
|
|
(Click
image to view.)
|
|
|