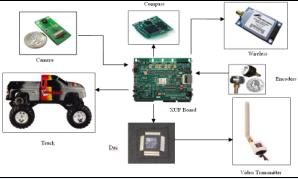
We have developed a custom FPGA board for small unmanned vehicles (UVs). The FPGA chip is the sole computational support on the
vehicle, so it performs all processing associated with sensing, communication, and control. A user can provide directives to
the UV, via a base station, a laptop or desktop computer that communicates wirelessly with the UV. The user can cause
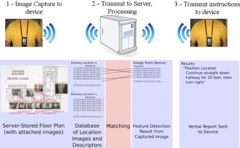
the UV to autonomously track and follow another vehicle or object by selecting an area in the image displayed on the base
station. To support this functionality, visual feedback must be provided to the user at the base station. This is accomplished
by converting each digital image captured by the FPGA vision sensor to an analog representation and transmitting
it as standard NTSC video that is received, digitized, and displayed on the base station.
The payload constraints imposed by small UVs can be severe. Image sensors are small and lightweight, but it is difficult to provide the necessary computational
power on the vehicle to process video in real-time at frame rate. Our system supports other sensors, but the principal source of information from the environment
in this work is a camera mounted on the vehicle. Our platform uses a Virtex-4 FX60 FPGA that includes two PowerPC CPUs on chip, in addition to configurable logic
resources. Thus, our application has two forms of computational support: conventional processors running compiled C
code, and custom hardware implemented in the FPGA fabric written in VHDL.