BASIS Feature
Descriptor Hardware Implementation BASIS Feature
Descriptor Hardware Implementation
|
|
|
|
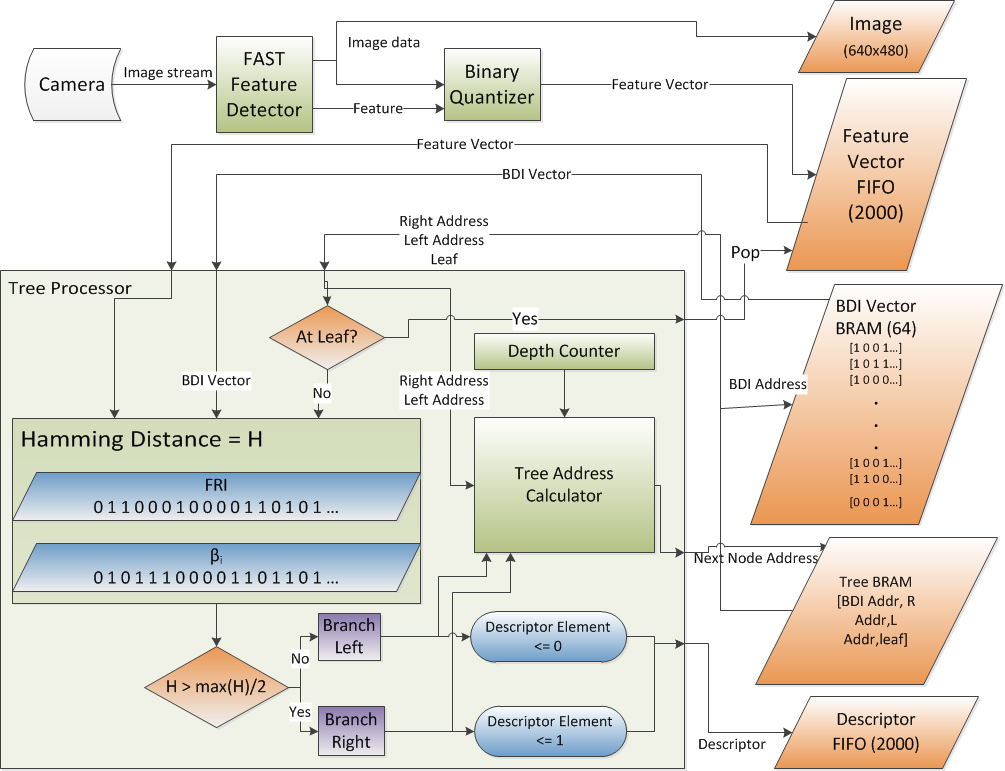
This
work develops a feature descriptor well-suited
for limited resource applications such as UAV
embedded systems, small microprocessors, and
small, low power field programmable gate array
(FPGA) fabric. The BAsis Sparse-coding
Inspired Similarity (BASIS) descriptor utilizes
sparse coding to create dictionary images that
model the regions in the human visual
cortex. Due to the reduced amount of
computation required for computing BASIS
descriptors, reduced descriptor size, and the
ability to create the descriptors without the
use of floating point, this approach is an
excellent candidate for FPGA hardware
implementation. The bit-level-accurate
BASIS descriptor was tested on a dataset of real
aerial images with the task of calculating a
frame-to-frame homography and compared to
software versions of Scale Invariant Feature
Transform (SIFT) and Speeded-Up Robust Features
(SURF). Experimental results show that the
BASIS descriptor outperforms SIFT and performs
comparably to SURF on frame-to-frame aerial
feature point matching. BASIS descriptors
require less memory storage than other
descriptors, and can be computed entirely in
hardware, allowing the descriptor to operate at
real-time frame rates on a low power, embedded
platform such as an FPGA.
|
|
Graduate Students:
|
Spencer
Fowers, Alok Desai
|
Publications:
- S.G. Fowers, A. Desai, D.J. Lee, D. Ventura, and
J.K Archibald, “Tree-Based Feature
Descriptor and Its Hardware Implementation,”
International Journal of Reconfigurable
Computing, vol. 2014, Article ID 606210, 12 pages,
November 2014.
- S.G.
Fowers, D.J. Lee, D.A. Ventura, and J.K
Archibald, “Nature Inspired BASIS Feature
Descriptor and Its Hardware Implementation,”
IEEE Transactions on Circuits and Systems for
Video Technology, vol. 23/5, p. 756-768, May
2013.
- S.G.
Fowers, K.D. Lillywhite, D.J. Lee, and D.K.
Wilde, “Color DoG: A Three-Channel Color
Feature Detector for Embedded
Systems,” SPIE Electronic Imaging,
Intelligent Robots and Computer Vision XXVII:
Algorithms and Techniques, vol. 7539, 75390X1-9,
San Jose, CA, USA, January 17-21, 2010.
|
|
(Click
image to view.)
|
|
|