Obstacle
Avoidance - SFM and Time-to-impact Obstacle
Avoidance - SFM and Time-to-impact |
|
|
|
In order for an unmanned
vehicle (UV) to safely navigate through its
course, it must be capable of detecting and
avoiding obstacles in its path. From a
single camera on the vehicle, the 3D structure of
its surrounding environment, including any
obstacles, can be estimated from motion parallax
using a technique called structure from
motion. We present a novel method for
calculating structure from motion that does not
require a precise calculation of optical flow at
each feature point.
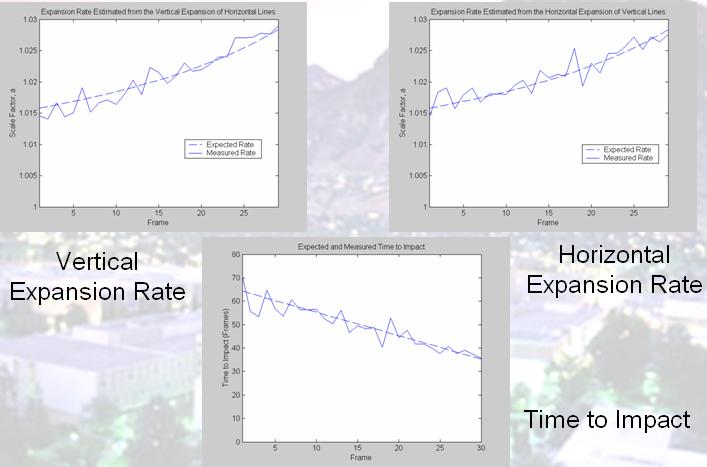
Another approach we
developed for autonomous vehicle to avoid obstacle
is using focus of expansion to calculate
time-to-impact. Feature points are detected
and a statistically analysis of their distribution
change helps determine time-to-impact. This
approach does not require accurate feature
tracking and is suitable for the ground vehicle
traveling on a planar surface. We implemented
this algorithm in an FPGA system.
|
|
Graduate Students:
|
Jonathan Anderson, Barrett Edwards, Wade Fife, and
Paul Merrell
|
Publications:
-
A.W. Dennis,
J.K. Archibald, B.B. Edwards, and D. J. Lee, “On-Board
Vision-Based See and Avoid for
Small UAVs,” AIAA Guidance, Navigation,
and Control Conference, Honolulu, HI, USA,
August 18-21, 2008.
-
B.B.
Edwards, W.S. Fife, J.K.
Archibald, D.J. Lee, and D.K. Wilde, "A
Design Approach for Small Vision-based
Autonomous Vehicles,” SPIE
Optics East, Intelligent Robots and Computer
Vision XXIV: Algorithms, Techniques, and
Active Vision, vol. 6384, 63840L, Boston, MA,
USA October. 3-4, 2006.
-
J.D.
Anderson, D.J. Lee, and J.K. Archibald,
“Hardware Implementation of Feature
Density Distribution Algorithm for
Autonomous Robot,” Proceedings
of The 31st Annual Conference of the IEEE
Industrial Electronics Society (IECON), p.
357-362, Raleigh, NC, USA, November 6-10,
2005.
-
P.C.
Merrell, D.J. Lee, and R.W. Beard, “Obstacle
Avoidance for Unmanned Air Vehicles Using
Optical Flow Probability Distributions”, SPIE
Optics East, Robotics Technologies and
Architectures, Mobile Robot XVII, vol.
5609-04, p. 13-22, Philadelphia, PA, USA,
October 25-28, 2004.
-
D.J. Lee, R.W. Beard, P.C. Merrell,
and P. Zhan, “See and Avoidance
Behaviors for Autonomous Navigation”, SPIE
Optics East, Robotics Technologies and
Architectures, Mobile Robot XVII, vol.
5609-05, p. 23-34, Philadelphia, PA, USA,
October 25-28, 2004.
-
P. Merrell, D.J. Lee, and R.W. Beard, “Statistical
Analysis of Multiple Optical Flow Values for
Estimation of Unmanned Air Vehicles Height
Above Ground”, SPIE Optics East,
Robotics Technologies and Architectures,
Intelligent Robots and Computer Vision XXII,
vol. 5608, p. 298-305, Philadelphia, PA, USA,
October 25-28, 2004.
|
|
(Click
image to view.)
|
|
|