Real-time
Optical Flow Real-time
Optical Flow
|
|
|
|
US Patent Patent# 9.361.706 was awarded on 06/07/2016.
Many computer vision applications require
real-time processing of image data. This
requirement is especially critical for
autonomous vehicles performing obstacle
avoidance, path planning, and target tracking
tasks. A quickly calculated and relatively
rough motion estimate is more useful for
autonomous navigation than a more accurate, but
slowly calculated estimate. Recent technology
advancements in small unmanned air and ground
vehicles make many low-cost surveillance and
military applications possible. Most of these
applications demand a low power, compact, light
weight, and high speed computation platform for
processing image data in real time. In most
cases, the traditional general purpose processor
and sequentially executed software approach does
not meet these requirements. In this
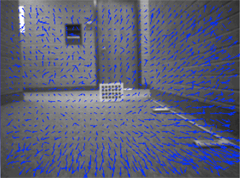
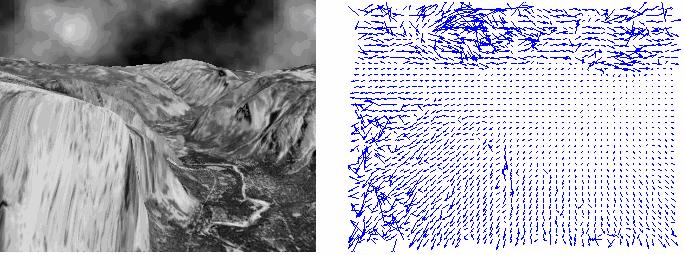
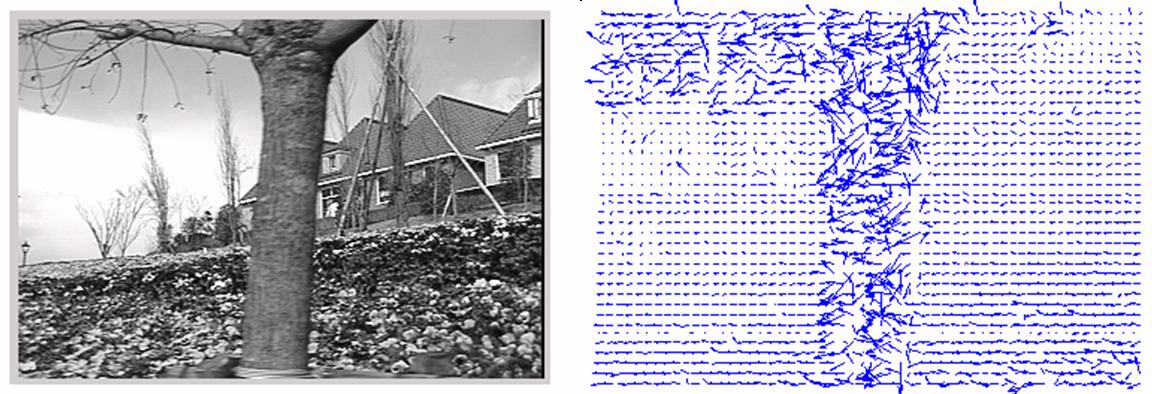
research, a tensor-based optical flow algorithm
is modified and implemented using field
programmable gate array (FPGA) for small
unmanned vehicle obstacle avoidance and
navigation.
|
| Project Sponsors: |
David and Deborah
Huber Scholarship |
|
Graduate
Students:
|
Zhaoyi Wei
|
Publications:
-
T.S. Simons and D.J. Lee, “A New Architecture for the Ridge Regression Optical Flow Algorithm,” The Southwest Symposium on Image Analysis and Interpretation, Las Vegas, NV, U.S.A., April 8-10, 2018.
- Real-Time Optical
Flow Sensor Design And Its Application To
Obstacle Detection
Patent: 12,651,907
-
Z.Y.
Wei, D.J. Lee, B.E. Nelson, and J.K
Archibald, “Hardware-Friendly Vision
Algorithms for Embedded Obstacle Detection
Applications,” IEEE Transactions on
Circuits and Systems for Video Technology,
vol. 20/11, p. 1577-1589, November 2010.
-
Z.Y.
Wei, D.J. Lee, and B.E. Nelson, “A
Hardware Friendly Adaptive Tensor-based
Optical Flow Algorithm,” Lecture
Notes in Computer Science (LNCS), Part II,
LNCS 4842, p. 43-51, International Symposium
on Visual Computing (ISVC), Lake Tahoe, CA,
U.S.A., November 26-28, 2007.
- Z.Y.
Wei, D.J. Lee, and B.E. Nelson, “FPGA-based
Real-time Optical Flow Algorithm Design and
Implementation,” Journal of Multimedia,
vol. 2/5, p. 38-45, September 2007.
-
Z.
Wei, D.J. Lee, B.E. Nelson, and M.A.
Martineau, “A fast and accurate
tensor-based optical flow algorithm
implemented in FPGA”, IEEE Workshop on
Applications of Computer Vision (WACV 2007),
Austin, Texas, USA, Feb 21-22, 2007.
|
|
(Click
image to view.)
|
|
|