UAV Ground Target Tracking UAV Ground Target Tracking
|
|
|
|
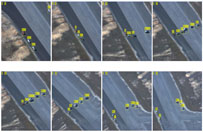
Tracking moving objects with a moving camera is a
challenging task. For unmanned aerial vehicle applications,
targets of interest such as human and vehicles often change their
location from image frame to frame. This paper presents an object
tracking method based on accurate feature description and matching, by
SYBA descriptor, to determine a homography between the previous frame
and the current frame. Using this homography, the previous frame can be
transformed and registered to the current frame to find the absolute
difference and locate the objects. Once the objects of interest are
located, the Kalman filter is then used for tracking their movement.
The proposed method is evaluated with three video sequences under image
deformation: illumination change, blurring and camera movement (i.e.
viewpoint change). These video sequences are taken from unmanned aerial
vehicles (UAVs) for tracking stationary and moving objects with a
moving camera.
|
|
Graduate Students:
|
Alok Desai
|
Publications:
-
A. Desai and D.J. Lee, “An Efficient Feature Descriptor for Unmanned Aerial Vehicle Ground Moving Object Tracking,” AIAA Journal of Aerospace Information Systems, vol. 14/6 : p. 345-349, June 2017. (SCIE)
-
A.
Desai, D.J. Lee, and M. Zhang, “Using Accurate Feature Matching
for Unmanned Aerial Vehicle Ground Object Tracking,” Lecture
Notes in Computer Science (LNCS), International Symposium on Visual
Computing (ISVC), Part I, LNCS 8887, p. 435–444, Las Vegas, NV,
U.S.A., December 8-10, 2014.
|
|
(Click
image to view.)
|
|
|