Stereo
Vision Hardware Implementation Stereo
Vision Hardware Implementation
|
|
|
|
In
most circumstances, determining an acceptable
tradeoff between speed and accuracy when
selecting a stereo vision algorithm for
implementation, is dependent upon the target
application. This work attempts to provide
perspective on the efficiency of existing
real-time stereo vision algorithms in terms of
this tradeoff. This work also provides an
example of modifying an existing highly accurate
stereo vision algorithm to increase its runtime
performance while trying to limit the loss in
accuracy. Such an example demonstrates the
challenge of making efficient tradeoffs in
accuracy for runtime performance. It is shown
that the modifications resulted in an 8X speedup
over the original algorithm, with accuracy
results comparable to existing real-time
algorithms.
An efficient stereo vision hardware design
implemented on an FPGA would be able to minimize
payload and power consumption on micro-UVs,
while providing them with 3D information and
still leaving computational resources available
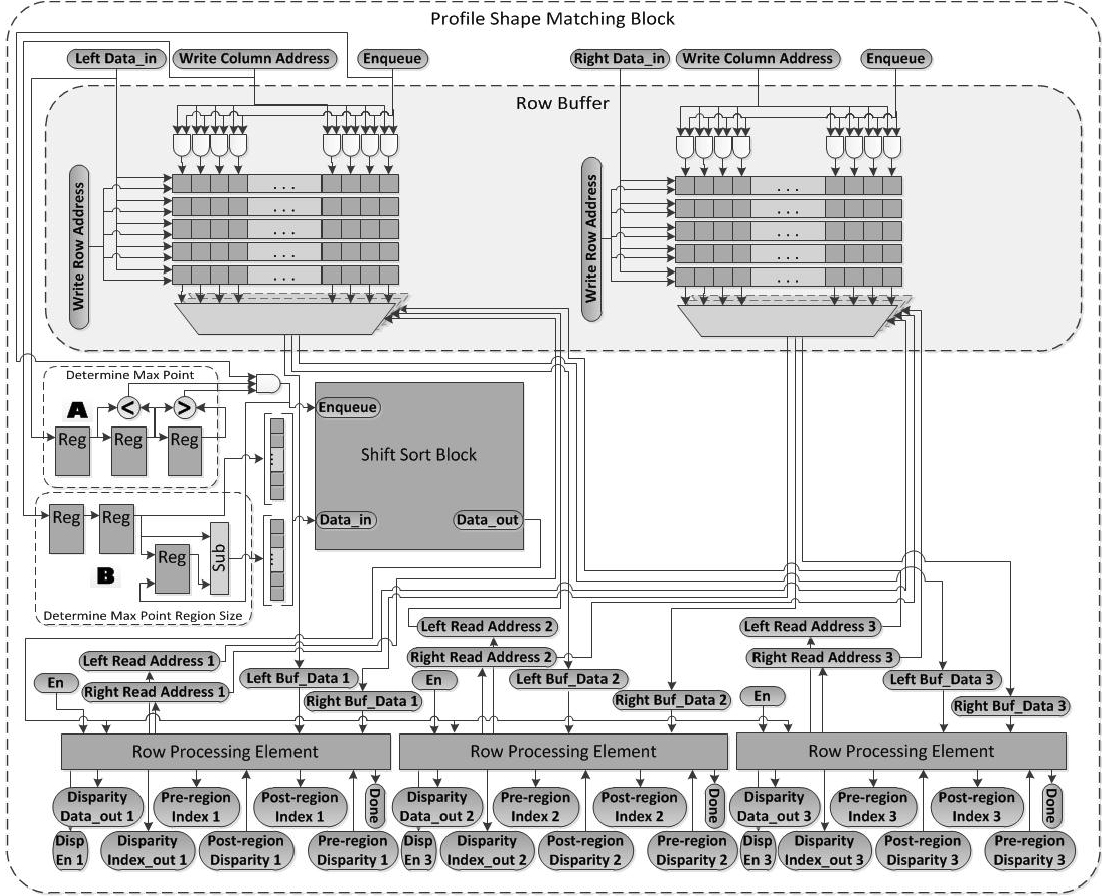
for other processing tasks. This work presents a
hardware design of the efficient Profile Shape
Matching stereo vision algorithm. Hardware
resource usage was presented for the targeted
Heliocopter platform that uses the Xilinx Virtex
4 FX60 FPGA. Less than a fifth of the resources
on this FGPA were used to produce dense
disparity maps for image sizes up to 450 x 375,
with the ability to scale up easily by
increasing BRAM usage. A comparison is given of
accuracy, speed performance, and resource usage
of a Census transform based stereo vision FPGA
implementation by Jin et al. Results show that
the Profile Shape Matching algorithm is an
efficient real-time stereo vision algorithm for
hardware implementations for resource limited
systems such as micro unmanned vehicles.
|
|
Graduate Students:
|
Beau Tippetts and Kirt Lillywhite
|
Publications:
-
B.J. Tippetts, D.J. Lee, K.D. Lillywhite, and
J.K Archibald, “Efficient Stereo Vision
Algorithms for Resource Limited Systems,”
Journal of Real-Time Image Processing vol. 10/1, p. 163-174, March 2015.
- B.J. Tippetts, D.J. Lee, K.D. Lillywhite, J.K
Archibald, “Hardware-efficient Design of
Real-time Profile Shape Matching Stereo
Vision Algorithm on FPGA,” International
Journal of Reconfigurable Computing, vol.
2014, Article ID 945926, February 2014.
|
|
(Click
image to view.)
|
|
|